Projects
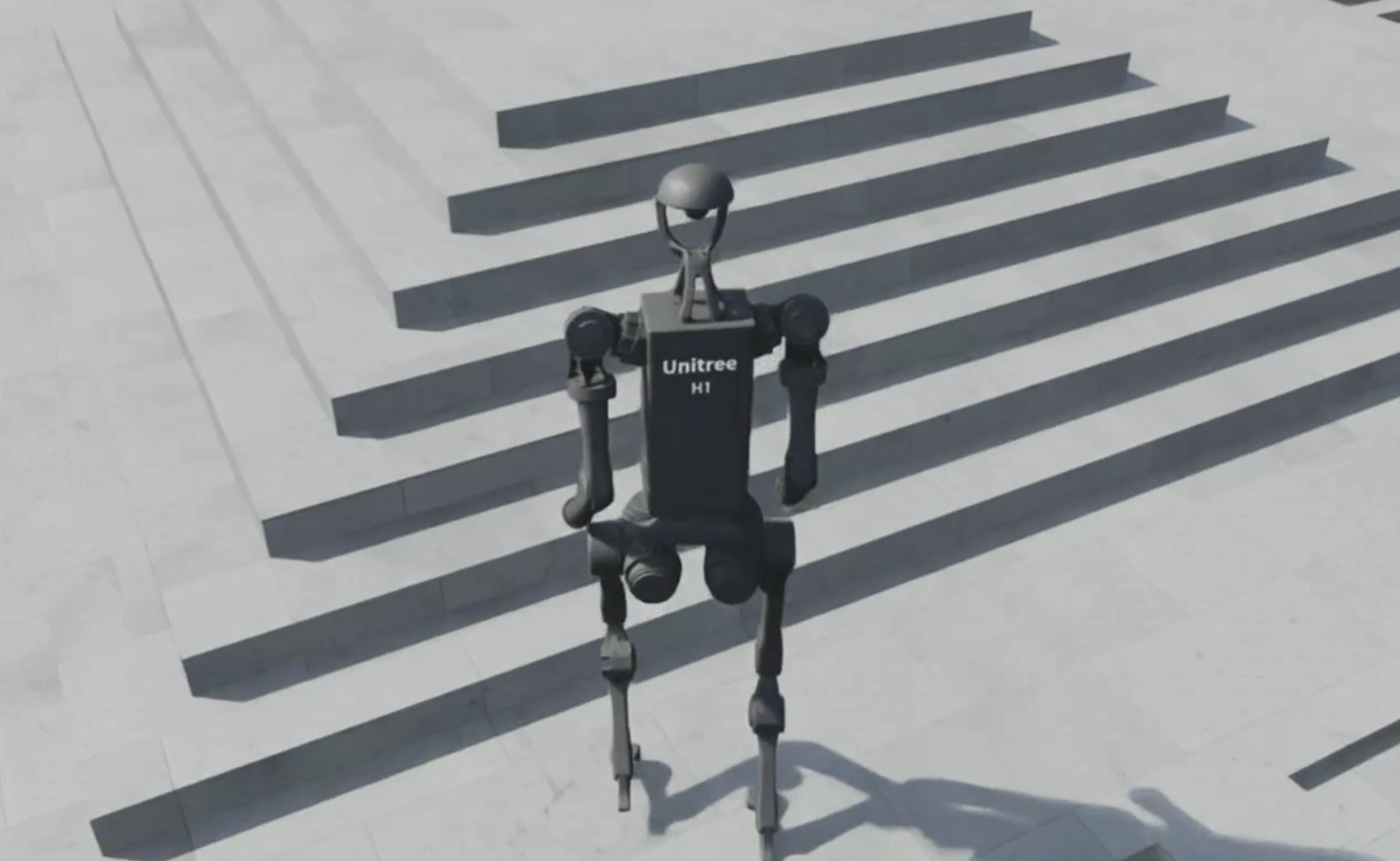
Unitree H1 Humanoid Locomotion in Isaac Lab
Trained a PPO locomotion policy for the Unitree H1 humanoid on rough terrain in Isaac Lab across 393M simulation steps using 4096 parallel environments. Policy achieved 99.3% episode survival rate and 0.74% fall rate at terrain curriculum level 5.76/8. Compared bipedal vs. quadrupedal convergence dynamics against the Anymal C baseline — H1 achieved higher final reward (28.58 vs 16.30) and lower fall rate, attributable to a 14-term reward structure including termination penalty and joint deviation regularization.

Quadruped Locomotion with Domain Randomization
Trained PPO locomotion policies for the Anymal C quadruped in Isaac Lab across 147M simulation steps. Designed an extended domain randomization experiment (friction 0.2–1.5, mass ±10 kg, joint parameters) and measured the robustness-performance tradeoff. DR policy reached comparable terrain curriculum progress (5.94 vs 5.98/8) demonstrating robust locomotion over a broader physics distribution relevant to sim-to-real transfer.
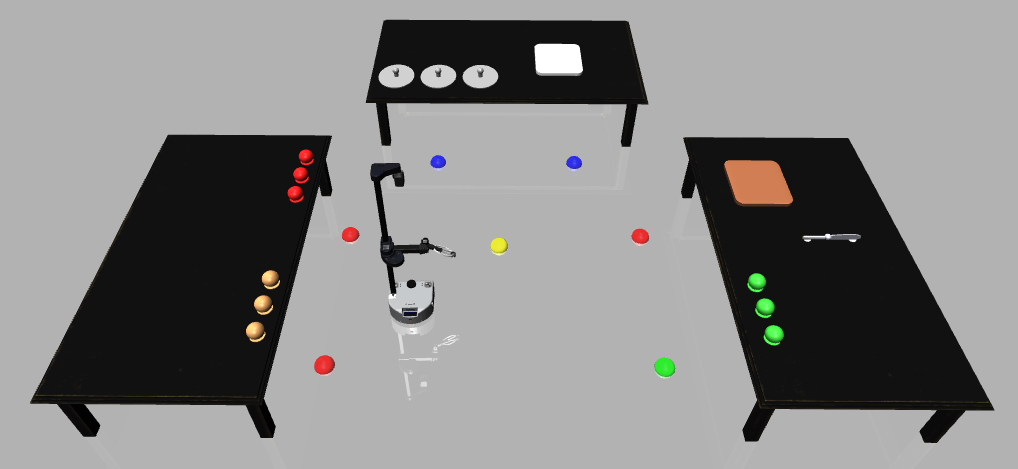
Stretch 3 Full Autonomy Stack
Designed and deployed a full autonomy pipeline from MuJoCo simulation to physical Stretch 3 for assistive HRI research. Implemented a hierarchical macro-action system coordinating navigation, perception, and grasping as a unified mobile manipulation stack. Achieved reliable autonomous pick-and-place on real hardware using Nav2, LiDAR SLAM (AMCL), ArUco-based object detection, and a Jacobian IK solver. Integrated speech recognition for voice-commanded task execution, demonstrated end-to-end on physical hardware.

3D Pointcloud Reconstruction
Incremental Structure-from-Motion pipeline that reconstructs a sparse 3D point cloud from monocular image sequences, recovering both scene geometry and full camera trajectory. Uses SIFT feature detection, RANSAC-based Essential Matrix estimation, PnP camera registration, and bundle adjustment to minimize reprojection error. Exports georeferenced PLY output.
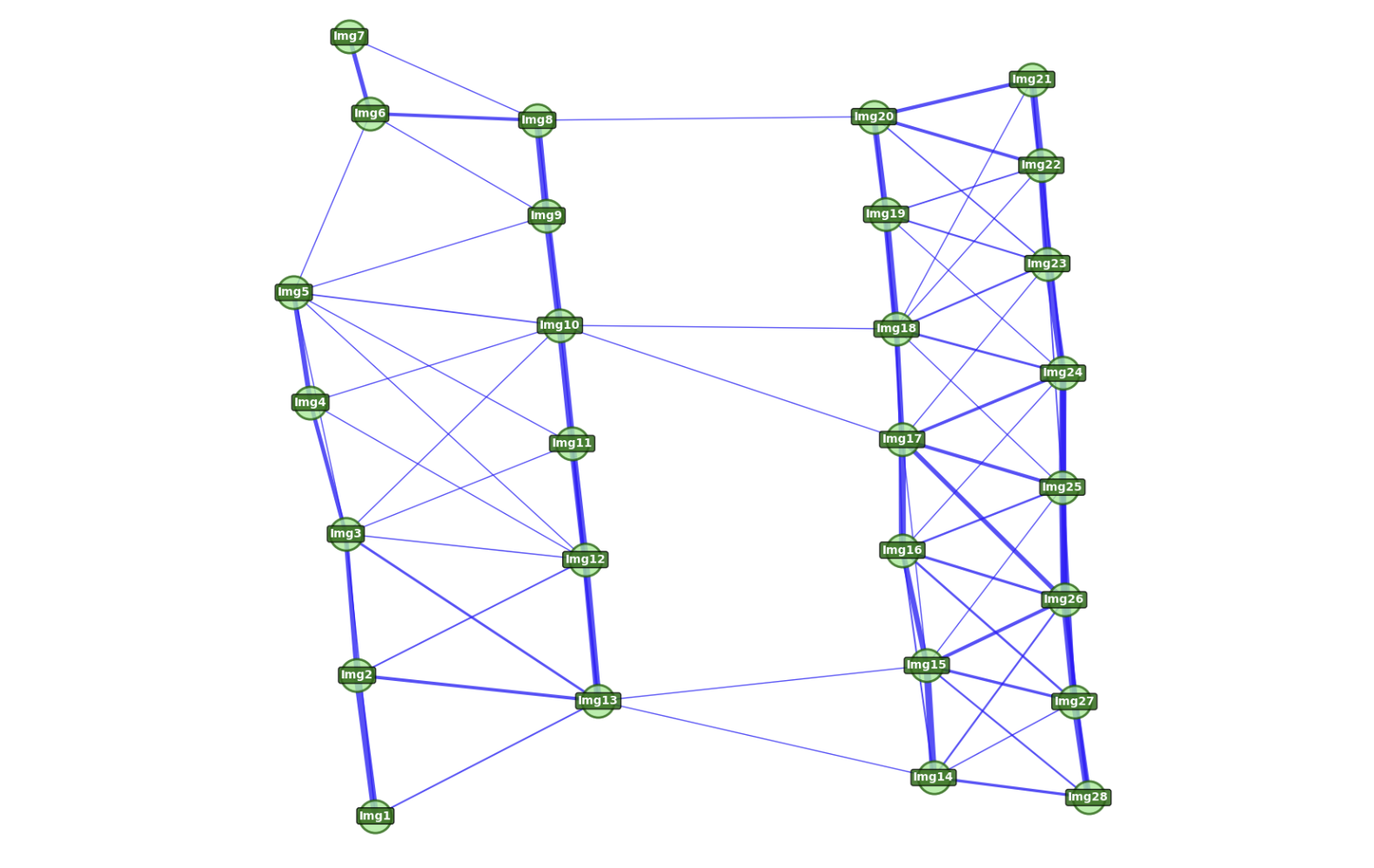
2D Mosaic Reconstruction
A 2D image stitching pipeline that builds globally consistent panoramas from overlapping image sequences by combining covariance-weighted graph construction, loop closure detection, and a GTSAM factor graph optimization to eliminate accumulated drift.
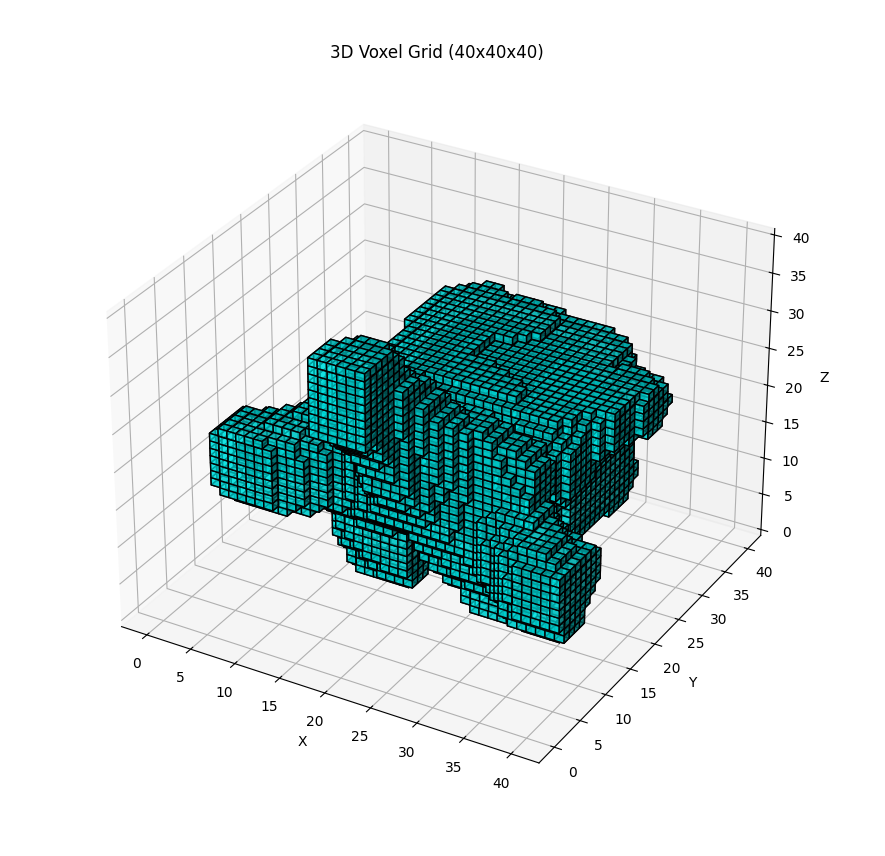
Equivariant β-VAE for 3D Shape Generation
Trained a 30M-parameter β-VAE on the MedShapeNet dataset to generate anatomically plausible 3D thoracic vertebrae from voxelized mesh data, achieving IoU of 0.62 on reconstruction. Evaluated both a standard CNN variant and a group-equivariant steerable CNN with octahedral symmetry; identified posterior collapse as the primary bottleneck via latent space diagnostics.
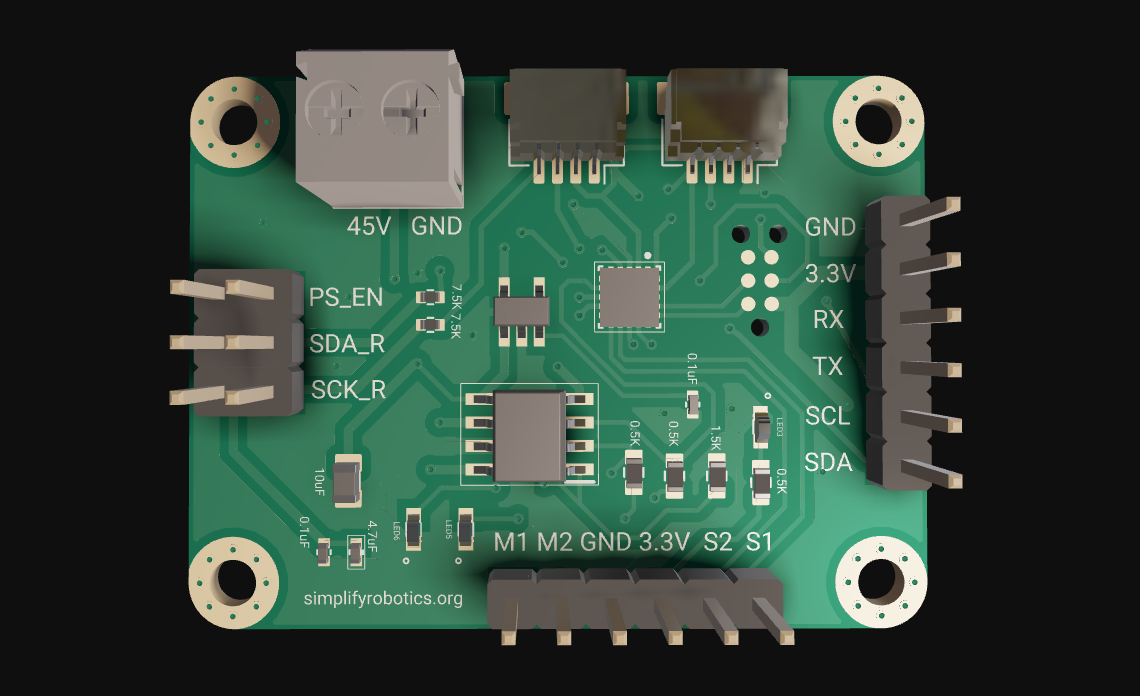
Feedback Motor Controller
Open-source closed-loop DC motor driver with custom PCB, STM32 firmware in C, onboard PID control and trapezoidal trajectory planning on a 30×40mm board. Plugs directly into any Raspberry Pi or microcontroller via Qwiic connectors — no soldering required. Up to 112 units daisy-chainable on a single I2C bus.

snowBoard
Open-source embedded prototyping module designed to eliminate soldering and complex wiring for field deployments. Features plug-and-play peripheral connectors, onboard SD card storage, battery power management, USB-C connectivity, and a built-in USB-to-UART converter for streamlined firmware flashing and debugging. Designed for field robotics and remote data collection.
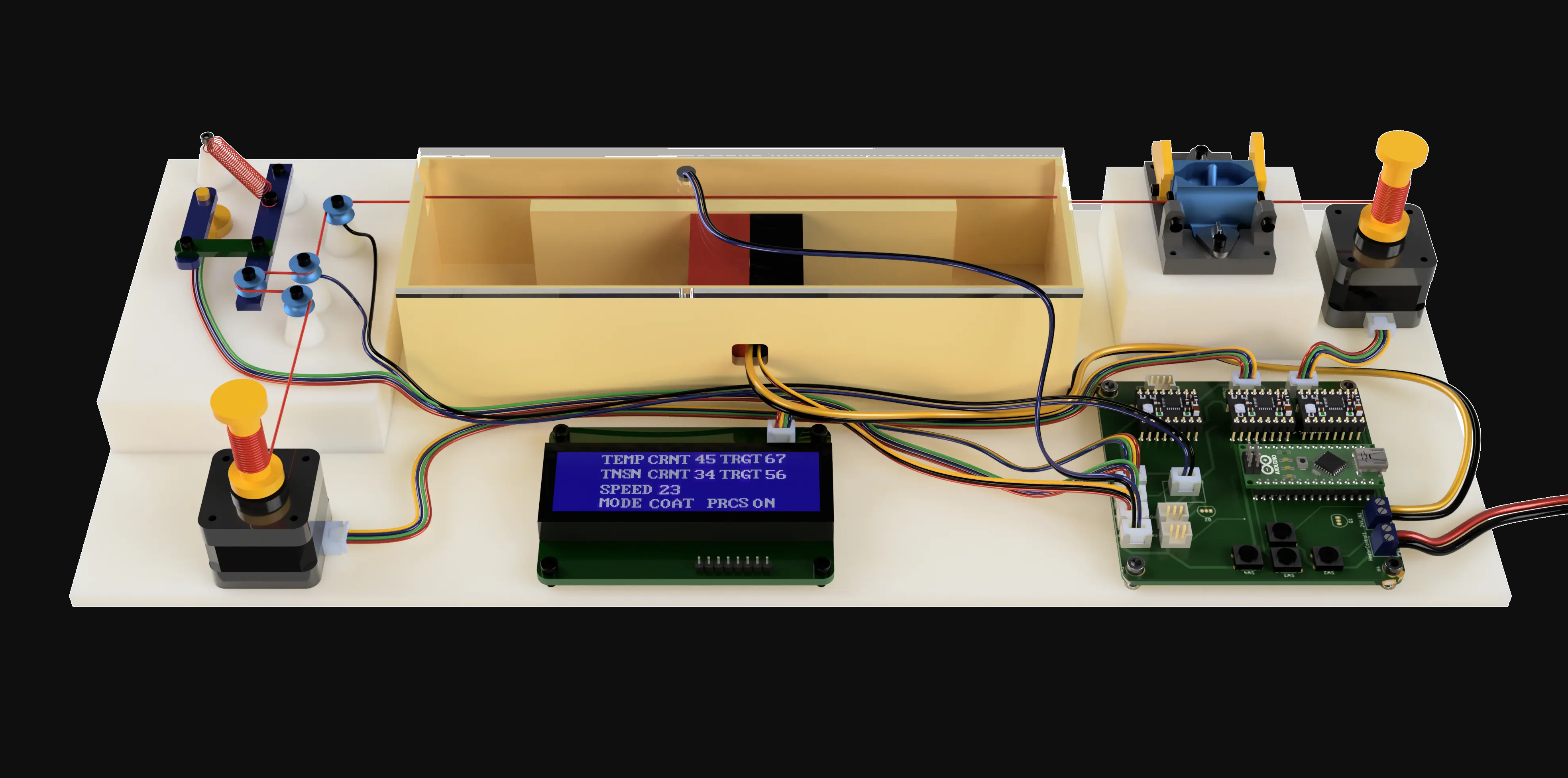
Tension Sensing Thread Factory
Automated smart thread sensor fabrication device built for Tufts NanoLab to support wearable electronics research. Custom PCB connects microcontroller to sensors and stepper motors; firmware implements real-time PID tension control, sensor data acquisition, and a user interface for system configuration. Accelerated prototyping cycles from weeks to hours with reproducible sensor output. Published at MDPI.
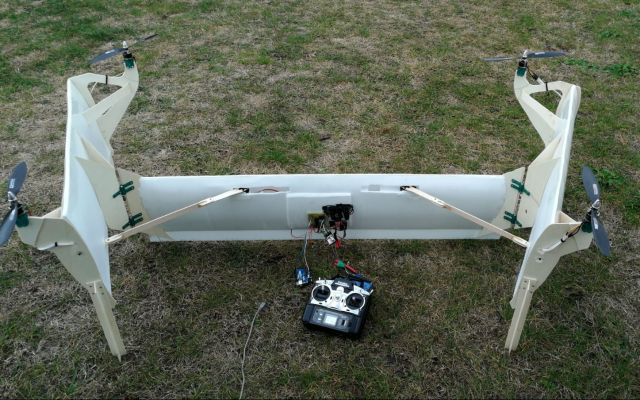
Convertible Wing Drone
Custom-built drone that converts between quadcopter and fixed-wing flight modes. Custom flight controller firmware in C++ on an AVR microcontroller with MPU6050 gyroscopic stabilization, PID attitude control, and dynamic PWM motor mixing. Handles the distinct control dynamics of both flight modes in a single firmware with mode-switching logic.
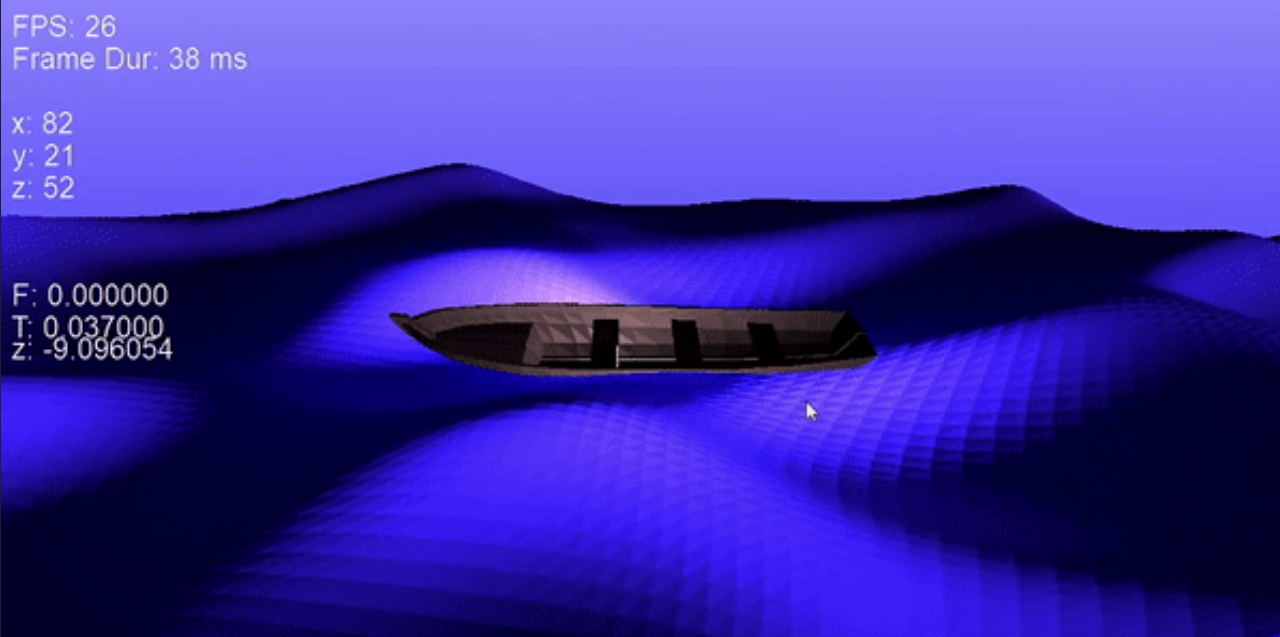
3D Software Rendering Engine
C++ rendering and physics simulation engine built entirely from scratch without external graphics libraries. Implements triangle rasterization, depth buffering, face culling, 3D projection, .obj model loading, and font rendering. Includes a buoyancy simulation that dynamically calculates buoyant forces and torque for realistic wave interaction on floating objects.
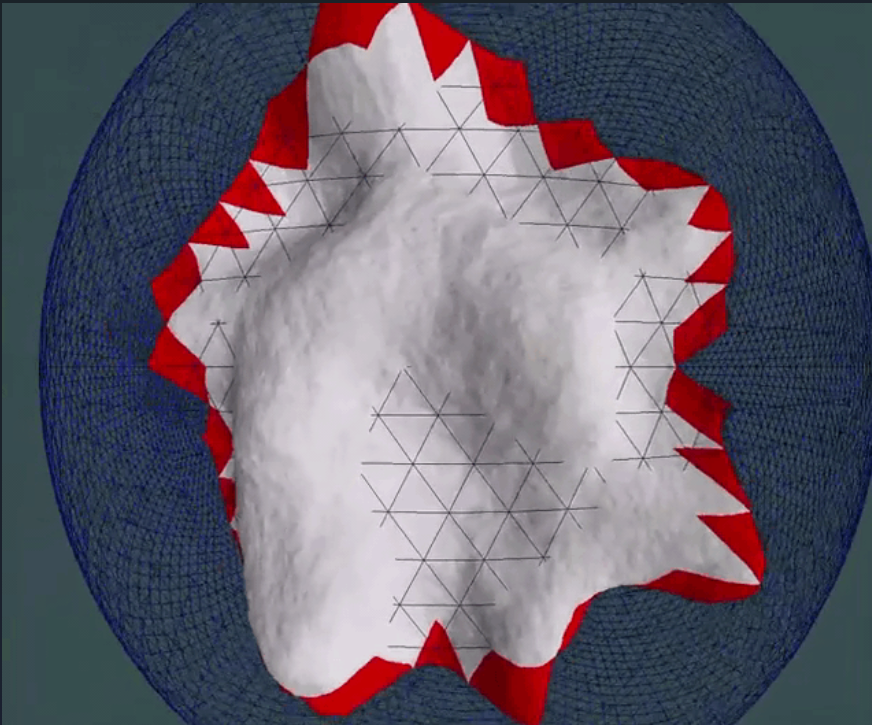
Procedural Spherical Map Generator
OpenGL-based tool for generating realistic planetary surfaces using procedural algorithms and noise functions.
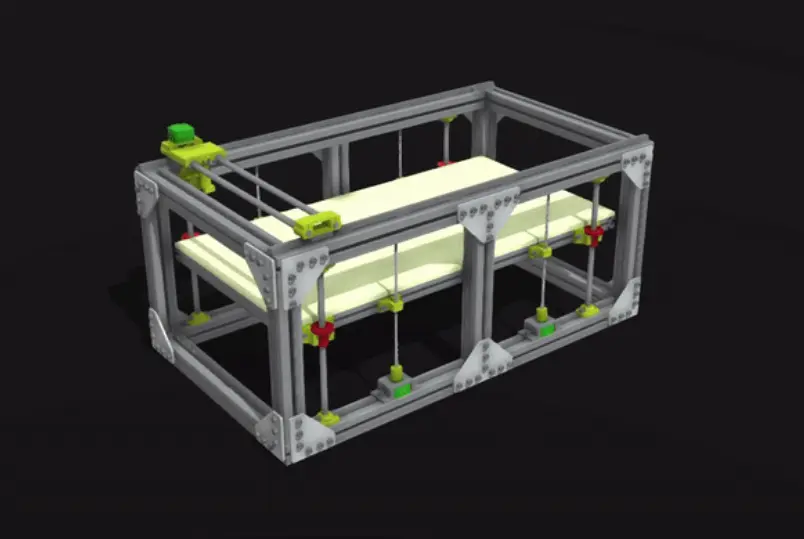
Large Volume 3D Printer
Custom-built open-source FDM 3D printer with a 110×75×40 cm build volume — large enough to print a full human torso in one piece. Designed from scratch with swappable extruder support including a syringe extruder for non-standard materials. Fully documented so anyone can replicate it at any scale.
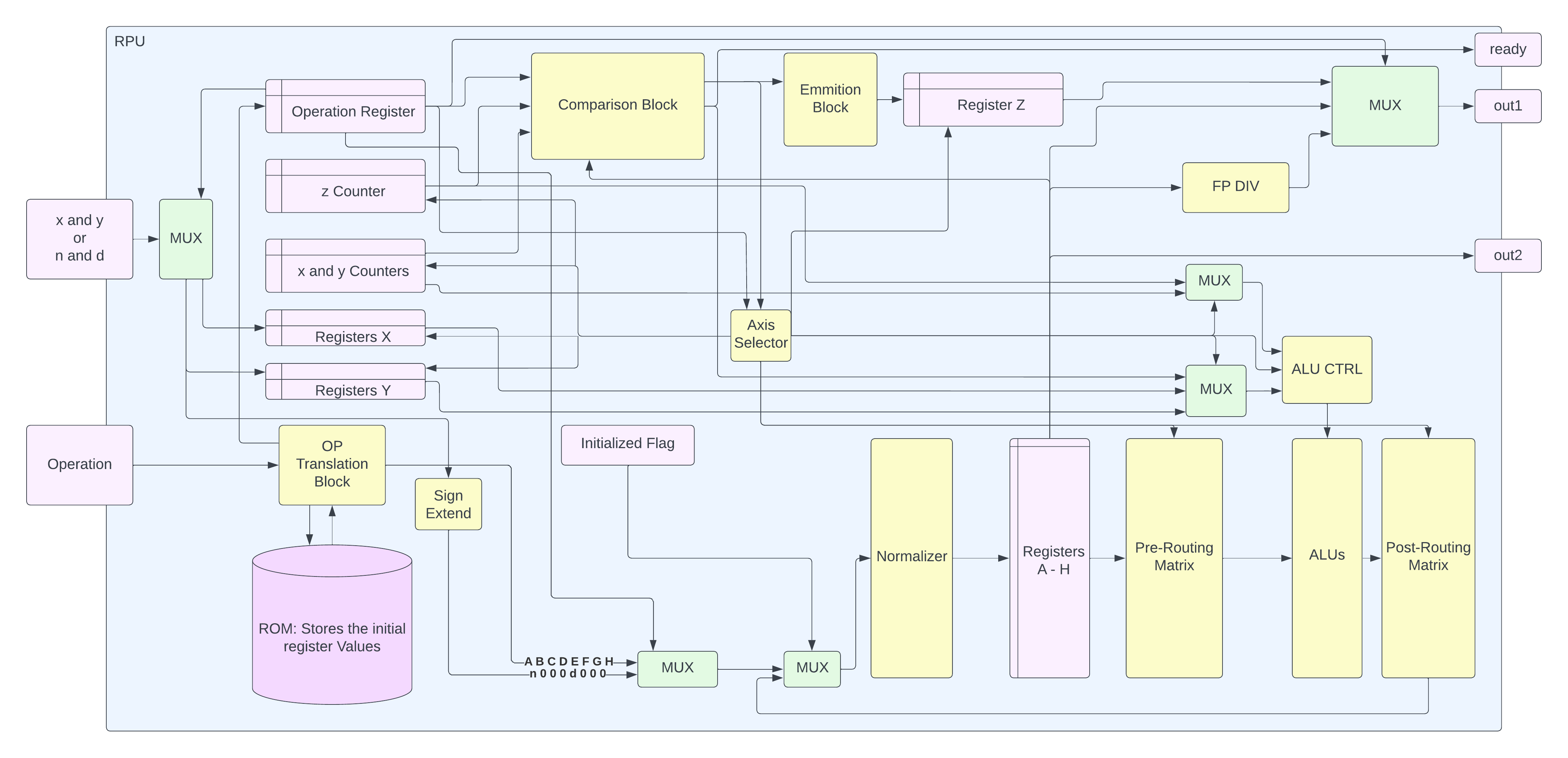
Rational Number Computing Accelerator
VHDL implementation of a Rational Arithmetic Unit based on Binary Continued Logarithms (BCLs) — a number format that stores rational numbers exactly without floating-point rounding error. Developed both the mathematical theory and the hardware logic design, enabling lossless arithmetic for scientific computing applications. Accompanied by a published research paper.